1. 引言
因为微型扑翼飞行器(FMAV)在低空探测、认知搜救、突然袭击、城市作战等方面有着固定翼和旋翼无法比拟的优势,引起了各国研究人员的广泛关注和极大兴趣。目前较前沿的研究成果有:美国蜂鸟飞行机器人Nano hummingbird、麻省理工学院的Phoenix普以及哈佛Wood团队研发的一款飞行昆虫机器人以及德国Festo公司的SmartBird等 [1] [2] 。
近些年来,随着无人机编队控制的发展,人们对扑翼飞行器的研究又走向了一个新高度。其中,将扑翼飞行器看成是一个智能体,那么对智能体一致性编队控制系统的研究一直在开展中。关于多智能体一致性编队控制系统问题的研究起源于Reynolds等学者模拟鸟群飞行运动提出的Boid计算机模型。该模型提出了三条规则:分离(Separation),聚合(Cohesion)和速度匹配(Alignment),这也成为之后许多学者们研宄群集问题广泛使用的规则 [3] [4] [5] [6] 。而真正开创性的工作是匈牙利物理学家Vicsek提出的模型 [7] 。
为了尽可能地发挥单个扑翼飞行器的作用,实现多个扑翼飞行器协同编队飞行的控制、决策和管理,从而提高扑翼飞行器完成任务的效率,拓宽使用范围,达到安全、高可靠性地执行各种任务的目的 [8] 。多智能体编队一致性飞行的概念应运而生,即将多架具有自主功能的智能体,按照一定的结构形式在三维空间中进行排列,使其在飞行过程中保持稳定的队形,并能根据外部情况和任务需求进行动态调整,以体现整个机群的协同一致性,并能完成飞行任务的规划和组织。
2. 基于多智能体的拓扑结构理论基础
多智能体系统一致性理论涉及众多领域中的问题,其中包括无人机编队的自主控制。但因为面对不同领域所设计的模型、所采用的一致性协议,都不一样,所以应该从最基本的理论根据实际情况构建所需的模型。
多智能体系统一致性理论的研究是以图论与矩阵论为基础发展而来的。用图论来描述多智能体之间的通信拓扑结构 [9] ,进而建立模型,再利用矩阵分析特征值和谱半径等指标,最后得出编队控制的稳定性分析,并取得一致性稳定判据。因此,我们先介绍代数图论的基本知识。
令图为
,其中
是顶点集合,顶点
表示第
个智能体,
是边的集合,
是一有向边,表示智能体
的信息可以传递给智能体
,
叫做
的邻居,记
的所有邻居组成的集合为
。
表示图
的邻接矩阵,反映点与边之间的关系,其中
。
令矩阵
,其中
,为A的第
行元素之和,即节点
的出度。
矩阵
是图
的Laplace矩阵
定义为:
3. 多智能体一致性编队控制问题的理论研究
3.1. 一阶系统一致性编队控制问题
表示第
个智能体的相关参数,如:位置,速度,加速度等,最后的多智能体系统 [10] 中所有的多智能体的参数信息都将趋于一致。
一阶系统的模型为:
(1)
其中
为控制协议。Saber在文献 [11] 中提出的线性系统分布式一致性协议如下:
(2)
其中
。
一阶系统的一致性稳定判据已经得到了理论证明,参考文献 [12] 给出的一致性稳定判据,只要通信拓扑结构中含有最小生成树 [13] [14] 就可以实现渐近一致性稳定 [15] 。
3.2. 带领导者二阶系统一致性编队控制问题
3.2.1. 一位主领导者的模型描述与分析
对于带有一位主领导者 [16] 的二阶系统,其动态模型为:
(3)
其中
,
表示位移,
表示速度,
表示控制输入,
代表的是领导者。其拓扑结构可简化为图1。
我们给出一致性协议 [17] 形式如下:
.(4)
其中
表示节点
与节点
之间的权值,
表示有信息传递,否则
,
表示领导者向与其邻接的成员传递信息的权值,
是调整因子。当系统最终实现一致性,即当
时,
,
。
,
,
则得到拉普拉斯矩阵
令
,
,应用协议(4),模型(3)可以写成矩阵的形式,如下:
(5)
其中,
,
是不对称的Laplace矩阵。
在求解
的特征值之前,我们首先求解
,
为矩阵
的特征多项式,则有下面式子:
(6)
(7)
以及:
(8)
其中
是
的第
个特征值。通过上面这三个式子(6) (7) (8),可以得到:
(9)
由式子(9),可知,通过求解
便能够求解式子(7)的根。因此,
的特征值如下:
(10)
其中
和
是矩阵
关于
的特征值。
从特征值的式子(10)可以看出,如果
含有
个零特征值,则
就有
个零特征值。因为
行向量之和为零,所以
关于向量1至少有一个零特征值,那么
就至少有2个零特征值。不失一般性,我们令
。此外,
是对角占优矩阵且对角元素是非正的,可知
的所有非零特征值均有负实部。
引理3.1:控制协议(4)渐近收敛到一致的条件是矩阵
含有两个零特征值,且其余所有特征值均有负实部。即当
时,
,
,其中
,是
关于零特征值的非负左特征向量且
。
证明:充分性。
令
是矩阵
关于零特征值的特征向量,其中
,有:
(11)
计算可知
,
。
是矩阵
关于零特征值的特征向量。当矩阵
含有两个零特征值时,
便有一个零特征值,因此
只含有一个关于零特征值的线性独立特征向量
,反过来矩阵
就只有一个关于零特征值的线性独立特征向量
。将
写成Jordan标准型 [18] :
(12)
(13)
其中
,为
的右特征向量或者广义特征向量,
为
的左特征向量或者广义特征向量,
是非零特征值
的Jordan对角矩阵。
不失一般性,我们令
,
,其中
,
分别为矩阵
关于特征值0的特征向量和广义特征向量。矩阵
有两个零特征值,那么
只有一个零特征值,即存在一个非负向量
,其中
,
。
,
分别为矩阵
关于特征值0的广义左特征向量和左特征向量。其中:
,
。特征值
有负实部,有
,
当
时,收敛到
,
注意到当
时,
,
由上可知
时,
,
,所以,
时,
,
,多智能体系统趋于一致。
必要性:假设矩阵
有两个零特征值,其他所有非零特征值均有负实部这个充分条件不成立,注意到矩阵
至少有两个零特征值,如果充分条件不成立,那么矩阵
的零特征值多于两个或者至少有一个其他非零特征值有正实部。不失一般性,我们令
,
,其中
表示矩阵
的第
个特征值,
表示实部。令
为矩阵
的Jordan标准型,
,可知
。反过来说明
的前三行是线性独立的,因此,
的秩至少为3,那么
的秩至少为3。只有当
时系统渐近趋于一致,其中
和
是
的向量。结果
的秩不可能超过2,与假设矛盾。
引理3.2:如果矩阵
只有一零特征值且其它非零特征值都有负实部,那么对于所有的
,一致性协议(4)渐近收敛。
欲证系统实现一致性的充分条件是网络拓
含有(有向)生成树,我们还需要给出下面引理:
引理3.3:只有当有向权重图
含有(有向)生成树时,其拉普拉斯矩阵
只有一个零特征值且其他非零特征值都具有负实部。
定理3.1:只有系统信息拓扑图含有(有向)生成树时,一致性协议(4)才能渐近收敛。
证明:如果一致性协议(4)渐近收敛,我们由引理3.1知矩阵
有两个零特征值,因此拉普拉斯矩阵
只有一个零特征根,再由引理3.3知网络拓扑
需含有(有向)生成树。
下面我们给出系统实现一致性的必要条件,首先给出下面的引理:
引理3.4:令
,如果
,
,那么
,其中
表示实部。
定理3.2:一致性协议(4)渐近实现一致的充分必要条件是系统网络拓扑含有(有向)生成树且
(14)
其中
为矩阵
的特征值,
和
分别代表实部和虚部。
证明:如果信息网络拓扑图含有(有向)生成树,由引理3.3可知
有一个零特征值其他所有非零特征值有负实部,不失一般性,令
,
,于是
有两个零特征值,非零特征值都具有负实部,如果式(14)成立,那么由引理3.4知
,其中
是
关于
的特征值,最后由引理3.1可以得出系统会渐近收敛到一致。
4. 仿真分析
4.1. 带一位主领导者的二阶多智能体系统仿真分析
网络拓扑结构如图所示。系统中
为主领导者,其余为智能体,该系统的Laplace矩阵可以写成对角阵,则该Laplace矩阵只有一个零特征值与其它具有负实部的非零特征值,那么该系统最后可以达到一致性。
其中,令
,
,
,
,
,
,则,显然有,
,
,
,
,
,
,
,
。
仿真结果如下所示。
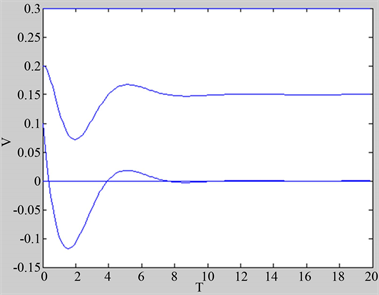
由图2可见,带有一个主领导者的二阶多智能体系统的位置、速度都随着主领导者的变化而变化,最终都收敛到一致。
4.2. 多位主领导者并行的二阶多智能体系统仿真分析
网络拓扑结构如图3所示。
其中,
是并行的主领导者,
为其余多智能体。由于每个领导者之间是并行的,互不影响,故该系统无法收敛到一致。由理论分析可知:
至少含有两个零特征值,那么
就至少含有四个零特征值,所有该系统是无法收敛到一致的,仿真结果如图4所示。
由图4可见:
是收敛到一致的,因为
只受到主领导者
的影响,而
不仅直接受到主领导
 (a)
(a) (b)
(b)
Figure 2. (a) Position-Time Simulation; (b) Velocity-Time Simulation
图2. (a) 位置—时间仿真;(b) 速度—时间仿真
 (a)
(a)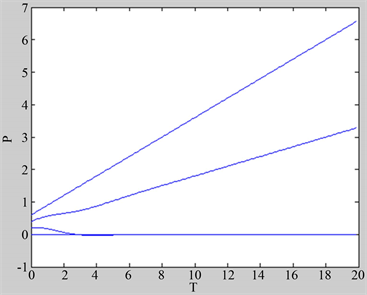 (b)
(b)
Figure 4. (a) Position-TimeSimulation; (b) Velocity-Time Simulation
图4. (a) 位置—时间仿真;(b) 速度—时间仿真
者
的影响,还通过
间接受到主领导者
的影响。其中,仿真过程中将主领导者
的速度设置为恒定的。可以得出,多个主领导者并行的二阶多智能体系统是无法收敛到一致的。
4.3. 总结
本文主要研究了一阶多智能体系统一致性问题,三种带领导者的二阶多智能体系统一致性问题。通过数学模型和设计控制协议,对一阶系统和三种带领导者的二阶系统进行描述,并用计算机对三种带领导者的二阶系统在对应的控制协议与拓扑结构下进行仿真分析,反映出了带有领导者的多智能体系统收敛一致性的情况,以及得出了影响系统一致性的因素,对于带领导者的二阶系统的编队情况做了较为详细的分类,深入地认识到领导者在多智能体系统中所占据的重要作用。
本文是在线性系统、同步信息交互和主领导者绝对影响次领导者与其它多智能体的理想情况下进行研究的,然而在实际中,速度往往是非线性的,信息交互是异步的,次领导者与普通多智能体成员会通过反馈影响主领导者。所以,在下一步的研究工作中,将致力于非线性、异步以及设计带有反馈的控制协议。
基金项目
南京航空航天大学基本业务费资助项目(NZ2012304)。