1. 引言
随着我国人口老龄化加剧,由脑卒中等病症引发的偏瘫患者呈急剧增加的趋势 [1]。卒中后通过肢体康复训练能够很大程度地预防脑神经的萎缩,促进损伤区域神经元的重组和细胞的再生,使患者可以尽早的改善和恢复运动能力。传统康复治疗中,通过康复治疗师一对一的治疗,可以帮助偏瘫患者减轻病痛、缩短康复周期、提高康复质量。然而受康复治疗师数量不足的限制,难以应对大量新增患者的康复需求。近年来,国内外涌现了许多新型神经康复机器人,不但可以替代康复治疗师,而且能使康复训练更具规律性和科学性,取得了很好的疗效。
国内外康复机器人的研究有很多,如图1所示。图1(a)为美国研制的MIT-MANUS系统,采用并联机构实现二自由度的平面康复运动,能够实现肩肘关节康复训练,能够为患者提供视觉反馈 [2];图1(b)为英国Leeds大学研制的iPAM具有交互式系统,能够协调促进患者上肢的运动 [3]。国内康复机器人研究起步较晚,但是也涌现出了一系列上肢康复机器人成果。图1(c)为哈尔滨工业大学设计了一种五自由度上肢康复机器人,采用伺服电机驱动方式和基于sEMG的控制方法 [4]。图1(d)为清华大学研究的二自由度上肢平面康复机器人设计有被动模式、助力模式和阻抗模式,能够对患者的康复状况进行评价 [5]。
 (a)
(a)  (b)
(b)  (c)
(c)  (d)
(d)
Figure 1. Research on rehabilitation robots at home and abroad
图1. 国内外康复机器人的研究
通过以上分析可见,目前我国在神经康复机器人领域的研究还比较落后,仍缺乏有自主知识产权的产品,急需新设计和新技术的出现。同时,国内外的神经康复机器人大都结构复杂、重量大,价格昂贵,难以在我国推广普及。为此本文设计了一种新型上肢神经康复训练机器人,并申请获批了国家发明专利 [6]。它具有机构设计简洁,控制方便,自重轻等特点。既可以进行上肢的肩、肘、腕的单关节康复训练,也可以进行多关节复合运动的康复训练,能够满足不同患者多样性的康复需求。
2. 设计方案
2.1. 总体方案的设计
多功能上肢神经康复训练机器人的总体设计、组成部分及其应用效果,如图2所示。

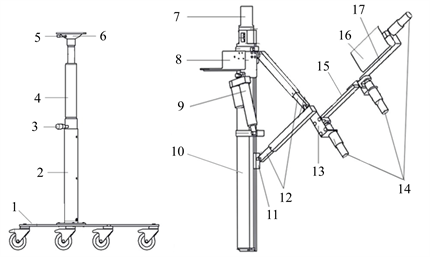 1-台车;2-下伸缩杆;3-锁紧销;4-氮气弹簧;5-氮气弹簧控制杆;6-连接台;7-电机;8-连接座;9-电动推杆;10-直线驱动器;11-滑块;12-伸缩方管;13-连接板;14-减速电机;15-前臂支撑板;16-手掌固定板;17-前部连接板
1-台车;2-下伸缩杆;3-锁紧销;4-氮气弹簧;5-氮气弹簧控制杆;6-连接台;7-电机;8-连接座;9-电动推杆;10-直线驱动器;11-滑块;12-伸缩方管;13-连接板;14-减速电机;15-前臂支撑板;16-手掌固定板;17-前部连接板
Figure 2. Composition of multifunctional upper limb nerve rehabilitation training robot
图2. 多功能上肢神经康复训练机器人的构成
机器人的整体结构可分为两大部分,无动力的支座部分(图2中)和电动执行部分(图2右)。
支座部分设有台车1,方便室内移动。通过下伸缩杆2能够进行高度的大幅度调节,通过锁紧销3固定位置。同时还可以通过氮气弹簧控制杆5调节氮气弹簧4实现连接台6高度的微调。装置高度的大幅度调节及微调能够满足不同患者不同姿态的康复需求。连接台6与连接座8相连接,实现了支座部分与电动执行部分的连接。
电动执行部分主要由直线驱动器10、电动推杆9、腕部和肘部减速电机14、伸缩方管12、前臂支撑板15、以及手掌固定板16等部件构成。前臂和上臂部分都设计成了可调节件来调整长度,同时上臂和前臂部分都加装了用来固定手臂的臂托和魔术绑带。
神经康复机器人可实现的5种动作,如图3所示。
通过直线驱动器滑块驱动连杆可以实现肩肘关节的联动屈伸动作,如图3(a)。与通常的机器人需要肩部和肘部两个电机才能完成相比,本设计只用一个电机驱动就可以完成,既减少了驱动元件简化了装置,又设置了限位提高了运动的可靠性。通过电动推杆,可以驱动抬肩动作图3(b)。将图3(a)和图3(b)的动作加以组合,就可以实现向任意方向的屈伸运动。通过肘部下面的减速电机,可以实现前臂内外回转运动图3(c)。通过手腕下方的减速电机,可以实现抬腕动作图3(d)。通过手指前的减速电机,可以实现转腕动作图3(e)。
综上所述,针对常见的康复训练动作,本设计均可在单个电机驱动的情况下完成,确保了可靠性和经济性。同时,对于复杂的多关节复合运动,本设计也可以通过多电机联动来完成,可以完成各种丰富的训练样式。
同时,通过手动调节支座部分的高度,以及与电动执行部分的连接方式,本设计可以实现坐姿、站姿、卧姿三种康复姿态的转换,如图4所示。
 (a)
(a)  (b)
(b)  (c)
(c)
Figure 4. Conversion of sitting, standing and lying posture
图4. 坐姿、站姿、卧姿的转换
2.2. 设计参数的确定
通过分析人体解剖学和人体上肢运动规律,本设计分析了设计所选取的五个自由度正常人体运动的极限范围,作为康复机器人的设计参数。因为患者运动功能受损,患者运动极限范围要比正常人的要小,因此将机构设计的实现运动范围适当缩小。正常人体运动极限范围和机构设计的运动范围如表1所示,其中角度初始位置为上肢自然下垂状态。

Table 1. Range of motion of main active joints of upper limbs
表1. 上肢主要活动关节运动范围
2.3. 电机选型计算
因为康复动作需要缓慢的进行,不能太快,因此需要康复机器人能够提供低转速、大转矩。
电机的驱动力矩包括两部分,一是人体上肢产生的重力转矩,二是机械臂本身产生的转矩。根据我国成年人人体质量分布等数据可查询到,90%以上的成年人单侧上肢的质量约£4.14 kg,上臂质量约£2.23 kg,前臂质量约£1.39 kg,手部质量约£0.52 kg。
由上述载荷同时将摩擦等因素考虑在内,本设计对各部位减速电机进行了计算选型。计算结果见表2。
电动推杆选型:24 V直流电源,功率为30 W,可提供推力为600 N (60 kg),速度为24 mm/s,行程为100 mm。
单轴驱动器选型:导轨长度700 mm,电机型号为A3040 (伺服马达用)-安川电机,功率50 W,转速3000 rpm。
3. 康复机器人的试制及性能实验
按照设计计算,制造了康复训练机器人实验样机,如图5所示。

Figure 5. Experimental prototype of neural rehabilitation training robot
图5. 神经康复训练机器人实验样机
通过运行实验样机的5个驱动电机,证明了康复训练机器人设计理念的合理性,康复训练动作与人的关节运动能够很好地相契合。通过实际使用,证明减速电机功率和速度的选型也是合理的。
如果机器人的5个电机一齐配合驱动,可以实现平滑的空间运动。实验时,尝试了打太极拳的运动,康复训练机器人样机能够很好的带动人体手臂模拟太极拳的动作。
4. 结论与展望
本文设计了一种能够完成五个自由度运动动作的上肢康复辅助训练装置,将康复治疗师和患者家属从沉重的负担中解放了出来。本装置将肩关节和肘关节的屈曲伸展运动联合成了一个复合动作,复合运动更有利于患者的康复。各部件都是通过严格的选型计算保证安全可靠,同时考虑设计了可调节长度和高度的机构,保证了装置的灵活性和通用性。整个装置结构紧凑,装置整体所占空间较小,有利于实现家用化和普及化。
在未来的工作中,将继续优化机构设计、提高控制系统智能化水平,同时积极与医疗机构合作进行康复训练的临床验证研究,争取尽早投入到康复治疗中。
参考文献